피지컬 AI 3 Layer 전략: 3D 공간 인지·영상 분석·로봇 행동 수직 통합 사례
2D CCTV만으로는 피지컬 AI가 완성되지 않습니다. 슈퍼브에이아이는 3D 공간 인지·Video Analytics·VLA 로봇 행동을 수직 통합한 3 단계 프레임워크로, NVIDIA 4대 스택 통합을 실증했습니다.


2D CCTV만으로는 피지컬 AI가 완성되지 않습니다. 슈퍼브에이아이는 MTMC·Gate3D·디지털 트윈으로 3D 공간 인지를, 영상 관제 솔루션(Video Analytics)로 산업 적용을, VLA로 로봇 행동까지 완결하는 3층 프레임워크를 구축했습니다.
Key Takeaways
피지컬 AI는 '3 Layer 구조'로 완성됩니다.
인지 → 분석 → 행동. 한 레이어만 잘하는 것이 아니라, 3D 공간 인지·영상 분석·로봇 행동을 수직 통합하는 것이 경쟁력입니다. 슈퍼브에이아이는 7년간 축적한 데이터 자산, 3D 비전 기술, NVIDIA 파트너십, 독파모 국책과제를 통해 세 레이어를 하나로 엮어냈습니다.
2D CCTV로 3D 공간 인지가 가능해졌습니다.
LiDAR 1억 원, 체커보드 캘리브레이션 수 일이 필요했던 작업을 기존 CCTV만으로 수 시간 내에 완료합니다. 다중 대상 다중 카메라 추적(MTMC), Gate3D(단안 3D 탐지), 디지털 트윈이 이 변화를 이끕니다.
'이해하는 AI'에서 '행동하는 AI'로 넘어가는 마지막 퍼즐은 데이터입니다. VLA(Vision-Language-Action, 비전-언어-행동 모델)는 기존 오픈소스만으로는 산업 현장에 배포할 수 없습니다. 슈퍼브에이아이는 독파모 국책과제로 한국 가정 50개소 4D 행동 데이터를 구축하고, Isaac Sim에서 합성 데이터를 생성하며, Teleoperation으로 고품질 데이터를 보강하는 파이프라인을 내재화했습니다.
왜 지금 피지컬 AI인가
2026년 1월 CES 기조연설에서 NVIDIA 젠슨 황 CEO는 "로보틱스의 ChatGPT 모멘트가 도래했다"고 선언했습니다. 수년간 연구실에 머물러 있던 로봇 AI가 마침내 산업 현장에 나올 준비를 마쳤다는 뜻입니다.
그러나 LLM 시장과 달리, 피지컬 AI 영역에는 아직 글로벌 톱 모델이 존재하지 않습니다. OpenAI·앤트로픽이 텍스트 AI를 장악한 것과 달리, 물리적 세계에서 인지하고 행동하는 AI는 여전히 기회가 열려 있습니다.
피지컬 AI란 AI가 물리적 세계를 인지 → 분석 → 행동하는 기술의 총체입니다. 3D 공간과 4D 행동 데이터를 학습함으로써, 물리 법칙이 작용하는 환경에서 스스로 판단하고 움직이는 체화된 지능(Embodied AI)을 지향합니다. 중요한 것은 피지컬 AI가 로봇만을 의미하지 않는다는 점입니다. 3D 비전으로 공간을 이해하고, 영상으로 상황을 분석하고, 궁극적으로 로봇·자율 시스템으로 행동하는 전체 스택을 포괄합니다.
Sim-to-Real Gap 해결 방법
피지컬 AI의 가장 큰 기술적 난제는 Sim-to-Real Gap입니다. 로봇이 가상 환경에서 학습한 동작을 실제 세계에 옮겼을 때 성능이 급락하는 현상입니다. 실제 공장에서 로봇에게 수만 번의 시행착오를 시키는 것은 장비 파손·안전 사고·운영 중단의 위험이 너무 큽니다. 시뮬레이션이 해법이지만, 가상 환경이 현실과 다르면 학습 결과가 무용지물입니다.

이 격차를 메우는 두 해결책이 고정밀 디지털 트윈과 SMPL 기반 인간 행동 시나리오입니다. 슈퍼브에이아이는 이 둘을 동시에 확보한 국내 유일의 피지컬 AI 기업이며, 정부 '독자 AI 파운데이션 모델 개발 사업(독파모)'에서 이 역할을 담당하고 있습니다.
슈퍼브에이아이의 피지컬 AI 3 Layer 전략
Layer | 역할 | 핵심 기술 |
Layer 1: 인지 | 피지컬 AI의 '눈' — 3D로 공간 이해 | MTMC 다중 카메라 추적, Mono3D, Gate3D, 자동 캘리브레이션 |
Layer 2: 분석 | 현장의 '상황 판단' — 산업 적용 | Video Analytics 솔루션 (Fortune 50 글로벌 고객) |
Layer 3: 행동 | '행동하는 AI' — 로봇 제어 | 독파모 R&D, Fastfive 데모, VLA 연구 |
로봇이 아무리 정교해도 공간을 3D로 이해하지 못하면 장애물과 충돌하고, 3D 인지가 아무리 정확해도 영상 분석이 없으면 상황을 판단할 수 없으며, 영상 분석이 아무리 똑똑해도 행동으로 옮기지 못하면 단순 알림에 그칩니다.
Layer 1: 3D 공간 인지 기술
왜 3D 인지가 전제되어야 하는가
전 세계에 설치된 CCTV는 10억 대가 넘지만, 대부분은 2D 영상만 출력합니다. "몇 미터 떨어져 있는가", "실제 크기는 얼마인가" 같은 물리적 정보는 파악할 수 없습니다. 그러나 산업 현장의 안전 규정은 모두 거리·위치·크기에 대한 3D 이해를 전제합니다.
- "지게차는 작업자로부터 2m 이내 접근 금지"
- "크레인 하중 접근 구역에서 작업자는 5m 이상 이격"
- "고소작업자는 지정 구역을 벗어나면 안 됨"
2D 영상에서는 카메라 각도에 따라 1m 거리도 3m처럼 보입니다. 이 판단 실패가 산업 안전사고의 직접적 원인이 됩니다.
기존 해법의 한계
방법 | 비용 | 한계 |
LiDAR 설치 | 장비 1억 원 이상/구역 | 대규모 산업 현장 배포 시 수십~수백 억 규모 불가능 |
수동 체커보드 캘리브레이션 | 저비용 | 카메라 50대 기준 수 일 소요, 위치 변경 시 전면 재작업 |
기술이 아니라 운영 비용이 현장 도입을 막아 온 것입니다.
슈퍼브에이아이의 접근: 기존 CCTV만으로 3D 공간 인지 전체 스택 구현
슈퍼브에이아이는 이미 설치된 일반 CCTV만으로 3D 공간 인지의 전체 스택을 구현합니다. 추가 센서 없이, 수동 작업 없이, 기존 인프라를 그대로 활용합니다. 추적 → 3D 탐지 → 자동 캘리브레이션 → 디지털 트윈에 이르는 4개 기술을 수직 통합했기 때문에 가능합니다.
① AnyTrack — 다중 카메라 실시간 추적(MTMC)
수십 대 카메라에 걸쳐 동일 객체를 끊김 없이 실시간 추적합니다. 업계 표준 5~10 FPS 대비 1~2 FPS만으로 안정적 추적이 가능한 자체 특허 기술로 연산량이 1/5 수준 — 고가 GPU 없이 일반 엣지 PC에서 구동됩니다. 대규모 현장 도입 비용을 획기적으로 낮추는 핵심 차별점입니다. CVPR 2025 벤치마크 논문 UMPN 대비 Wildtrack HOTA +15.4, SCOUT HOTA +21.2, MOTA +42.0으로 전 지표 초과 달성했습니다.
② Gate3D — 단안 카메라만으로 3D 탐지
LiDAR 없이 일반 CCTV 영상만으로 물체의 3D 위치·크기·방향을 탐지합니다(등록특허 KR 10-2904365, CVPR 2025 Workshop 발표). 자율주행용 모델이 실내 산업 환경에서는 AP3D 1 이하로 사실상 작동하지 않는 문제를, Indoor AP3D 14.83(2위 대비 9.6배 격차)으로 해결했습니다. 공장 CCTV에서 지게차-작업자 간 1.5m 이하 상황을 센서 설치 없이 감지합니다.
③ 자동 캘리브레이션 — 대규모 배포의 병목 제거
체커보드 없이 촬영 영상만으로 카메라 파라미터를 자동 추정합니다. 기존 며칠이 걸리던 작업이 수 시간으로 단축되며, 카메라 위치 변경 시에도 재촬영만으로 즉시 재보정이 가능합니다. '기술 데모'에서 '상용 배포'로 넘어가는 가장 큰 병목을 제거하는 핵심 기술입니다.
④ splatify — 3D 디지털 트윈 파이프라인
실제 공간을 사진만으로 포토리얼리스틱 3D로 복제합니다. 3D Gaussian Splatting 기술로 NeRF 대비 약 100배 빠른 실시간 고화질 렌더링이 가능합니다. 생성된 디지털 트윈에 물리 속성(마찰·충돌 계수)을 부여하면, NVIDIA Isaac Sim에서 로봇이 실제와 거의 동일한 환경에서 훈련할 수 있어 Sim-to-Real gap을 최소화합니다.
기술 보호: 3D Vision 관련 특허 7건 보유(등록·출원 포함).
실행 가이드: 3D 공간 인지 도입을 검토 중이라면 "신규 하드웨어 설치 없이 기존 CCTV를 활용할 수 있는가"를 먼저 확인하세요. LiDAR 기반 제안은 PoC 단계를 넘어 양산 배포에 이르는 TCO(총소유비용)가 비현실적입니다. 슈퍼브에이아이 방식은 기존 인프라를 그대로 쓰므로 초기 PoC부터 전사 확대까지 동일한 기술 스택으로 스케일할 수 있습니다.
Layer 2: Video Analytics 산업 적용 사례
기존 영상관제의 구조적 한계
CCTV AI 시장 고객들이 공통적으로 전하는 피드백이 있습니다. "기존 AI CCTV의 성능이 기대치의 50% 이하" — 150개 이상의 기업 고객을 대상으로 파악한 결과입니다. 이 불만족은 개별 제품의 문제가 아니라 구조적 한계에서 비롯됩니다.
- 사전 학습 모델 고정
- 납품 시점 모델이 현장에서 성능 급락해도 개선 방법 없음. 조명·계절·레이아웃 변경에 대응 불가
- 커스텀 AI 불가
- 고객별 안전 시나리오에 모델 맞출 수 없음. MLOps 파이프라인 부재
- 2D 한계
- 거리·크기 판단 불가. 3D 기반 안전 시나리오 구현 불가
슈퍼브에이아이의 구조적 답: Data-centric MLOps × ZERO × 3D 인지
- Data-centric MLOps
- 현장 배포 후에도 데이터 수집 → 선별 → 재학습 플라이휠 구동
- 비전 파운데이션 모델 ZERO의 Zero-shot
- 학습 데이터 없이 즉시 적용, 이후 현장 데이터로 정밀화
- 3D 공간 인지
- 거리 기반 시나리오까지 커버
국내 산업 현장 적용 — 안전 관제
중대재해처벌법(2022년 시행) 이후 대형 제조·건설·에너지 현장의 AI 안전 관제 수요는 급증했으나, 현장에서 실제로 작동하는 솔루션은 극소수입니다. 슈퍼브 VA는 동일한 기술 스택(ZERO + Data-centric MLOps + 3D 인지)으로 다음 고객 현장에 적용 중입니다.
- 스마트 조선소 안전 관제(싱가포르): 안전고리 미체결, 지게차 5m 근접, 크레인 하중 접근. 1차 테스트에서 지게차 근접 86%, 안전고리 80% 달성. 20,000장 이상 현장 데이터를 ZERO로 자동 선별 — ZERO 없이는 이 속도의 데이터 확보 불가.

- 건설 현장 안전 관제: PTZ CCTV 16 채널, 3개 시나리오. RF-DETR + YOLO + MoGe 3D 재구성으로 단안 카메라만으로 3D 거리 기반 위험 감지 구현. On-Prem 폐쇄망 배포로 건설 현장 보안 요건 대응.
- 발전소 안전 관제: 화기작업·고소작업·신호수·크레인 4개 시나리오. NVIDIA Jetson 엣지 + LTE 동글 + AWS + On-Prem 하이브리드 구성. SHEM(안전관리시스템) 연동 계획.
공통 시사점: 안전 관제 현장 모두 동일 기술 스택으로 대응 — 슈퍼브 VA가 산업 범용적인 플랫폼임을 실증합니다.
인프라 운영 사례
인천공항 — 출국장 여객 흐름 관리(유상 PoC, 2024.10~11): NVIDIA + 슈퍼브에이아이 + 인천공항공사 3자 공동 실증. 여객 수 MAE 2~3명, 이동 시간 MAE 2분 이내. 기존 Xovis 전용 센서 대비 비용 50% 절감.

글로벌 Go-to-Market — NVIDIA 파트너십
슈퍼브에이아이는 NVIDIA의 'Last Mile ISV for VLM-powered solutions'로 선정되어, NVIDIA가 전략 고객을 직접 소개·중개하는 파트너십 구조를 확보했습니다. GTC 2025·COMPUTEX 2025·GTC 2026 3회 연속 NVIDIA와 공동 발표했습니다.
- NVIDIA VSS Blueprint 통합 파트너: AI Blueprint for Video Search & Summarization에 featured integration partner로 참여.
Layer 3: 로봇 AI와 VLA 기술
Layer 1은 공간을 3D로 이해하고, Layer 2는 상황을 판단합니다. 그러나 '이해'와 '판단'만으로는 피지컬 AI가 완성되지 않습니다. 피지컬 AI의 최종 목표는 AI가 실제 세계에서 물리적 행동을 실행하는 것 — 물건을 옮기고, 장애물을 피하고, 도구를 사용하는 로봇입니다.
VLA(Vision-Language-Action, 비전-언어-행동 모델)란 무엇인가
"냉장고에서 물을 꺼내줘"라는 자연어 명령을 받으면, 시각(냉장고 위치 파악) → 언어(명령 이해) → 행동(문 열고 물 꺼내는 관절 동작 생성)을 수행하는 모델입니다. VFM이 '보고 이해하는 AI'라면, VLA는 이해한 것을 행동으로 옮기는 AI입니다.
슈퍼브에이아이의 포지셔닝은 "VLA 모델을 처음부터 독자 개발"이 아닙니다. Layer 1·2에서 축적한 3D 인지 역량과 데이터 인프라가 VLA 학습의 핵심 입력이 되는 구조입니다. 로봇이 행동을 학습하려면 "어떤 공간에서, 어떤 사물을, 어떻게 조작하는가"에 대한 데이터가 필요하고, 이 데이터를 만들 수 있는 능력이 차별점입니다.
5단계로 증명하는 피지컬 AI 파이프라인
슈퍼브에이아이는 2026년 초 사내 데모에서 피지컬 AI 전체 사이클을 5개 데모로 구현했습니다. 각 데모는 하나의 서사를 구성합니다.
- 4족 로봇 자율주행: Digital Twin 3D 지도에서 로봇이 자율 이동·장애물 회피. 고정 CCTV의 사각지대를 이동형 로봇 카메라가 보완.
- Digital Twin + Isaac Sim: splatify로 공간을 3D 스캔 후 Isaac Sim에서 SMPL 인체 모델 배치, 도메인 랜덤화로 합성 데이터 무한 생성.
- Teleoperation(로봇 팔 + VR): Leader-Follower 방식. 로봇 팔(PiPER) 직접 조작 + VR 헤드셋으로 휴머노이드에 Motion Retargeting. "사람이 가르치는 모든 동작이 VLA 학습 데이터".
- Robot VLA: "망고를 왼쪽으로 옮겨줘" → 로봇이 관절을 직접 제어해 실행. 언어 명령 → 시각 인지 → 물리적 행동의 완전한 루프.
고객 적용 시나리오: Layer 1·2로 현장을 실시간 관제하는 VA 시스템이 로봇에게 "B 구역 팔레트를 A 구역으로 옮겨" 같은 작업 명령을 내립니다. VLA 로봇이 이를 자율 실행합니다. 물류 창고, 제조 라인, 가정 서비스 등 로봇이 투입되는 모든 환경에서 동일한 구조가 적용됩니다.
VLA R&D 로드맵
슈퍼브에이아이는 글로벌 VLA 모델 전 계열(RT-1/2, π0, GR00T N1/1.5/1.6)을 연구하고 있으며, PiPER Dual Arm Teleoperation 시스템 4대로 VLA 학습 데이터를 자체 수집하는 파이프라인을 내재화했습니다.
로드맵: 오픈소스 VLA 평가 → 독파모 Phase 2 Digital Asset을 학습 입력으로 활용 → Isaac Sim 합성 데이터 파이프라인 → Teleop 실제 데이터 보충 → VLA fine-tuning + RL post-training → Sim-to-Real 80% 이상 목표.
합성 데이터가 '양'을, Teleop 데이터가 '질'을 담당하는 구조입니다.
피지컬 AI 생태계: 독파모 + NVIDIA
독파모 — 대한민국 AI 역사상 최대 규모 국책과제
'독자 AI 파운데이션 모델 개발 사업'(독파모)은 총 예산 5,300억 원(약 4억 달러)으로 대한민국 AI 역사상 최대 규모 국책과제입니다. 슈퍼브에이아이는 이 컨소시엄에서 비(非)-LG 계열 중 유일한 '파운데이션 모델 개발' 담당으로 참여합니다. 더 중요한 차별점 — 나머지 4개 컨소시엄은 모두 LLM(텍스트)에 집중하지만, LG 컨소시엄만이 VLM/멀티모달/피지컬 AI를 추구한다는 것입니다. 슈퍼브에이아이가 이 방향의 핵심 실행 역할을 맡고 있습니다.
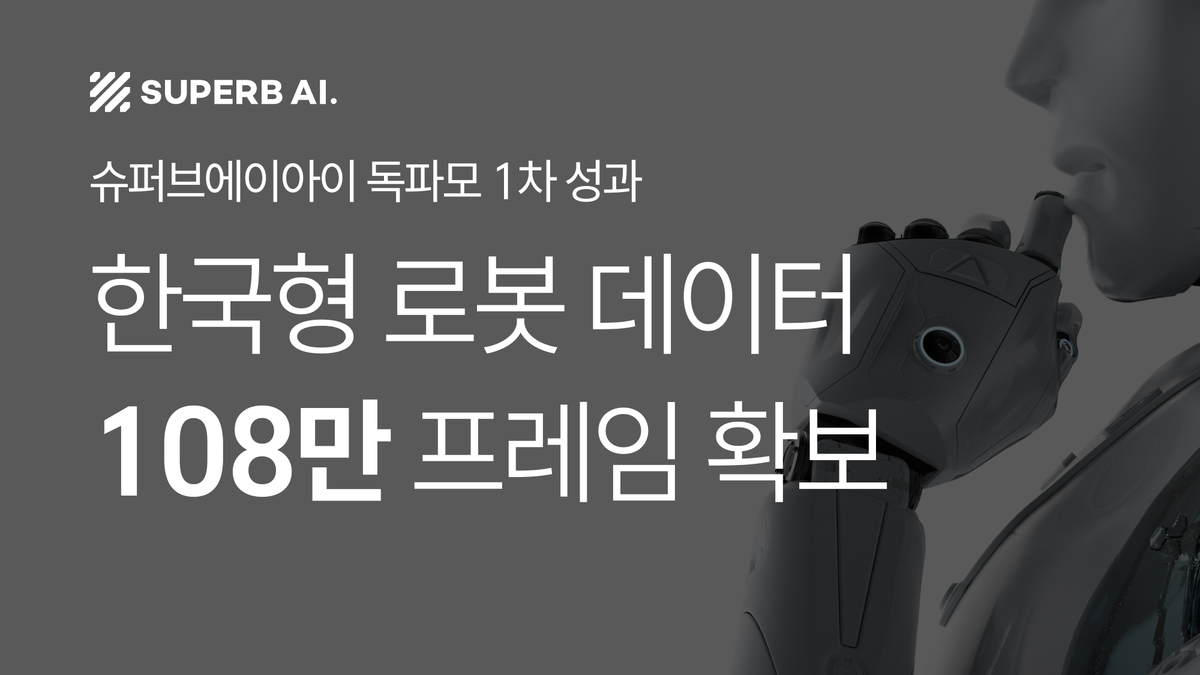
Phase 1 성과(2025.9~12): 50개 한국 가정, 17대 카메라 시스템, Raw 1,080,000 프레임, 영상 850시간, 라벨링 300,000 프레임. TTA 제3자 품질검증(TTA-PD-25-01.12)에서 목표 85~90점 대비 달성 96~99점 — OD 정밀도 98.35%, Seg 99.48%, Pose 94.95%, Scene 99.74%, VQA 96.88%로 전 항목 목표 초과. Superb AI Platform의 Auto Curate로 수작업 대비 5배 이상 효율 달성했습니다.
Phase 2(2026.1~6, 진행 중): '교과서'를 '가상 교실'로 변환하는 단계.

Part | 산출물 | 용도 |
Part 1 | 3D 디지털 트윈 30~50개소 | USD 형식으로 Isaac Sim 직접 로딩 |
Part 2 | 4D Human Motion 5,000 시나리오 | VLA 자연어→물리 동작 학습 |
Part 3 | 인스턴스 세그멘테이션 10,000 프레임 | 로봇의 사물 조작 포인트 학습 |
Synthetic PoC | Isaac Sim 10,000 프레임 | 엣지 케이스 비용 1/10, Sim-to-Real 80%+ |
Phase 3(2026 하반기): Synthetic Data Factory 구축.
Phase 4(2027): Edge Case 확보, Sim-to-Real 격차 최종 해소.
NVIDIA 피지컬 AI 생태계 통합 — 4대 스택 동시 파트너
슈퍼브에이아이는 NVIDIA 피지컬 AI 기술 스택 4개를 동시에 통합하는 희소 파트너입니다.
NVIDIA 스택 | 슈퍼브에이아이 활용 |
Isaac Sim | 독파모 Phase 2·3 핵심 인프라 |
Cosmos | 슈퍼브 MLOps로 fine-tune해 산업 환경 특화 |
Metropolis | MTMC + DeepStream/Triton 통합 |
VSS Blueprint | GTC 2025·COMPUTEX 2025·GTC 2026 공동 발표 |
이 4개 스택 동시 통합이 의미하는 것은 슈퍼브에이아이가 NVIDIA 피지컬 AI 비전 — '디지털 트윈에서 로봇을 학습시키고 실제 세계에서 배포하는 전체 사이클' — 을 데이터 인프라부터 엣지 배포까지 구현할 수 있는 파트너라는 점입니다.
FAQ
Q1. 슈퍼브 영상 관제 솔루션을 사용하려면 기존 CCTV 인프라 투자를 모두 교체해야 하나요?
교체하지 않습니다. AnyTrack(MTMC), Gate3D(단안 3D 탐지), 자동 캘리브레이션 모두 기존 일반 CCTV 영상만으로 동작하도록 설계되었습니다. LiDAR 구역당 1억 원, 체커보드 수동 캘리브레이션 수 일의 비용·시간 장벽 없이 현재 인프라를 그대로 확장할 수 있습니다. 인천공항 PoC에서 Xovis 전용 센서 대비 비용 50% 절감을, S사 건설 현장에서 PTZ CCTV 16 채널만으로 3D 거리 기반 위험 감지를 실증했습니다.
Q2. VLA 로봇 AI는 실제 산업 현장에 도입할 수 있는 수준인가요?
글로벌 오픈소스 VLA(RT-2, π0, GR00T)는 실험실 환경의 pick-and-place에 최적화되어 있어 산업 현장 즉시 배포는 아직 어렵습니다. 그러나 피지컬 AI의 전 과정이 하나의 시스템으로 작동 가능한 수준에는 도달했습니다.
권장 단계적 접근: Layer 1·2부터 먼저(즉시 ROI) → Digital Twin 구축 → Teleoperation 데이터 수집 → VLA 파일럿. 독파모 Phase 4(2027) 완료 시점이 산업 환경 VLA의 양산 배포 본격화 시기가 될 전망입니다. 지금이 데이터와 인프라를 미리 준비할 시점입니다.
Q3. 보안이 엄격한 제조·에너지 현장도 가능한가요?
가능합니다. 슈퍼브에이아이의 모든 Layer는 On-Premise 완전 독립 운영을 전제로 설계되었습니다. K사(Jetson 엣지 + LTE + On-Prem 하이브리드), S사(On-Prem 폐쇄망), M사(400 채널 2-Stage 아키텍처)가 실증 사례입니다. VFM 모델 자체를 고객사에 제공하는 구조이므로 외부 API 의존 없이 사내망 안에서 모든 학습·추론이 완결됩니다. AWS Rekognition, Google Vision 등 클라우드 종속 솔루션과 구조적으로 다른 지점입니다.
Q4. 기존 비전 AI 벤더와 비교해 가장 큰 차별점은?
슈퍼브에이아이는 "3 Layer 전체를 수직 통합한 국내 유일 기업"입니다. 경쟁사 대부분은 Layer 2(영상 분석)만 제공해 조명·계절·레이아웃 변경에 대응 불가합니다. 일부 글로벌 경쟁사는 VFM을 보유하지만 MLOps 부재로 현장 맞춤 불가합니다.
슈퍼브에이아이는 Data-centric MLOps + ZERO VFM·Agentic AI + 3D 인지·VA·VLA를 수직 통합해 현장 배포 후에도 지속적 성능 개선이 가능합니다. 23건 등록 특허, 3D Vision 특허 7건, NVIDIA 4대 스택 통합, CVPR 2025 2위 등 객관적 증거가 뒷받침합니다.
결론: 피지컬 AI 시대의 경쟁력은 '수직 통합'에서 나옵니다
피지컬 AI 시대의 경쟁력은 개별 기술의 우수성이 아닙니다. 인지 → 분석 → 행동의 3 Layer를 수직 통합하고, 그 위에 데이터 인프라와 생태계 파트너십을 얹는 '전체 루프'의 성숙도가 경쟁력을 결정합니다.
슈퍼브에이아이의 전체 아키텍처는 다음과 같습니다.
- 1층 — Auto-Label/Auto-ML: 데이터 구축 + 모델 학습 자동화(2~6주 파이프라인)
- 2층 — ZERO VFM + Agentic AI: 재학습 없는 즉시 적용 + 자율 검사관
- 3층 — 피지컬 AI 3 Layer: 3D 인지 + Video Analytics + VLA 로봇 AI
이 세 편은 독립된 기술이 아니라 하나의 수직 통합 스택입니다. 각 레이어가 다음 레이어의 입력이 되는 구조이기에, 데이터에서 출발해 로봇 행동까지 이르는 완전한 루프가 만들어집니다.
지금이 의사결정의 시점입니다. 로보틱스의 ChatGPT 모멘트가 도래한 2026년, 피지컬 AI는 더 이상 미래 기술이 아닙니다. 슈퍼브에이아이의 수많은 고객들과 함께 이미 현장에서 작동하고 있습니다.
피지컬 AI 도입을 검토한다면, 다음 중 하나의 진입로를 권장합니다.
- 🛰️ Layer 1 PoC: 기존 CCTV 50대 규모 현장에서 AnyTrack + Gate3D 실증 — 신규 HW 없이 3D 공간 인지 검증
- 🏭 Layer 2 파일럿: 1개 라인에서 ZERO Zero-shot 즉시 배포 + Data-centric MLOps 플라이휠 구동 — 3개월 내 성능 80→90%+ 달성
- 🤖 Layer 3 로드맵 설계: Digital Twin(splatify) + Teleoperation 데이터 수집 파이프라인부터 시작 — VLA 도입의 기반 자산 구축
'이해하는 AI'에서 '행동하는 AI'로 — 슈퍼브에이아이의 전문가와 함께 현장에 맞는 피지컬 AI 도입 경로를 설계하세요.