포인트 클라우드 라벨링 도구 출시

정확한 3차원 학습용 데이터의 구축은 인공지능(AI) 모델 개발에 있어서 중요한 역할을 합니다. 자율주행, 로봇 공학, 그리고 증강 현실과 같은 다양한 산업 분야에서 3차원 데이터는 모델의 성능 향상에 핵심인데요. 이러한 데이터의 중요한 구성 요소 중 하나는 포인트 클라우드 데이터가 있습니다. 이제 슈퍼브 플랫폼에서도 포인트 클라우드 데이터의 라벨링이 가능하게 되었습니다.
포인트 클라우드(Point Clouds) 란?
: 3차원(3D) 공간에 있는 객체 또는 공간을 나타내는 데이터 포인트의 집합
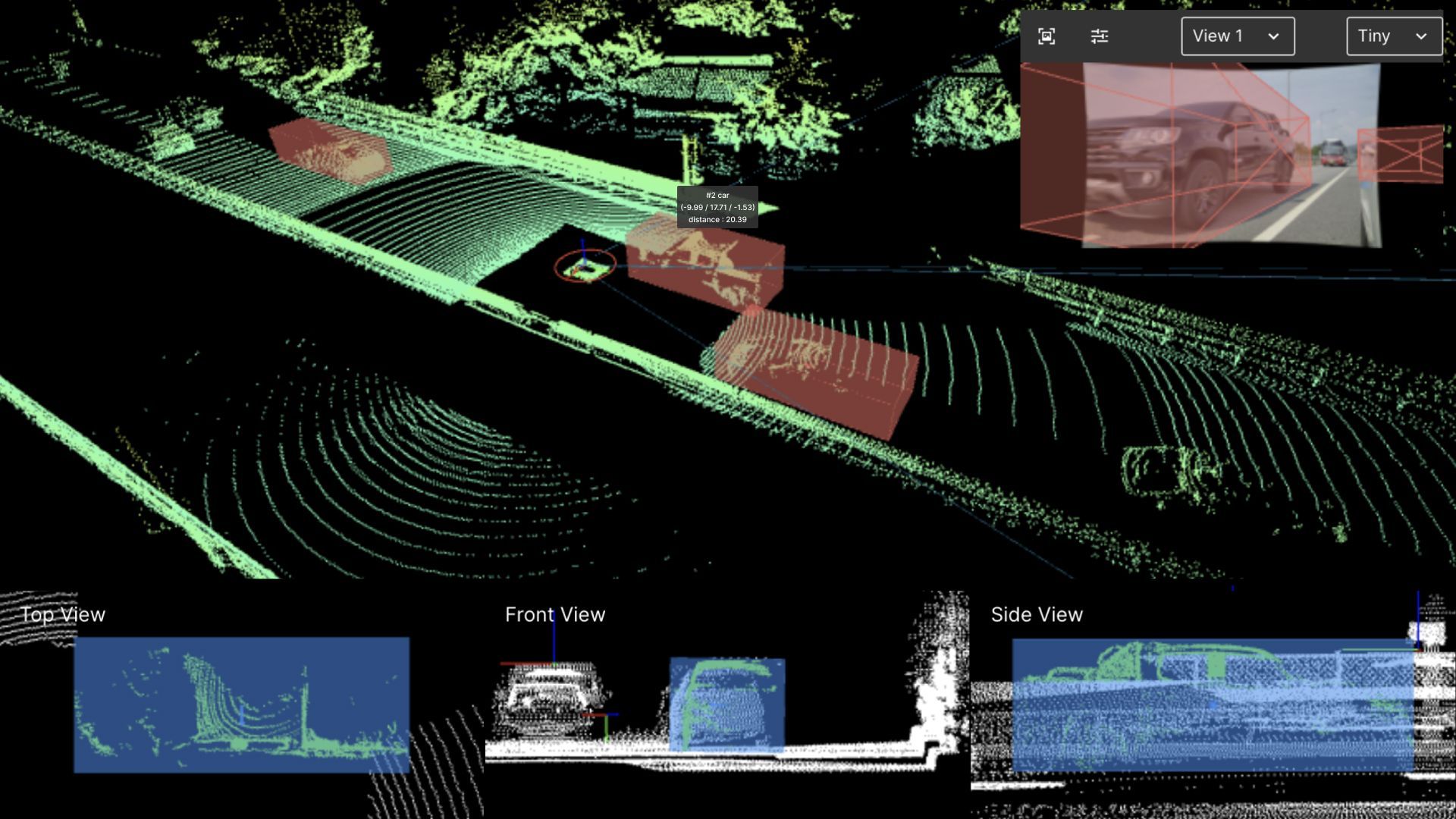
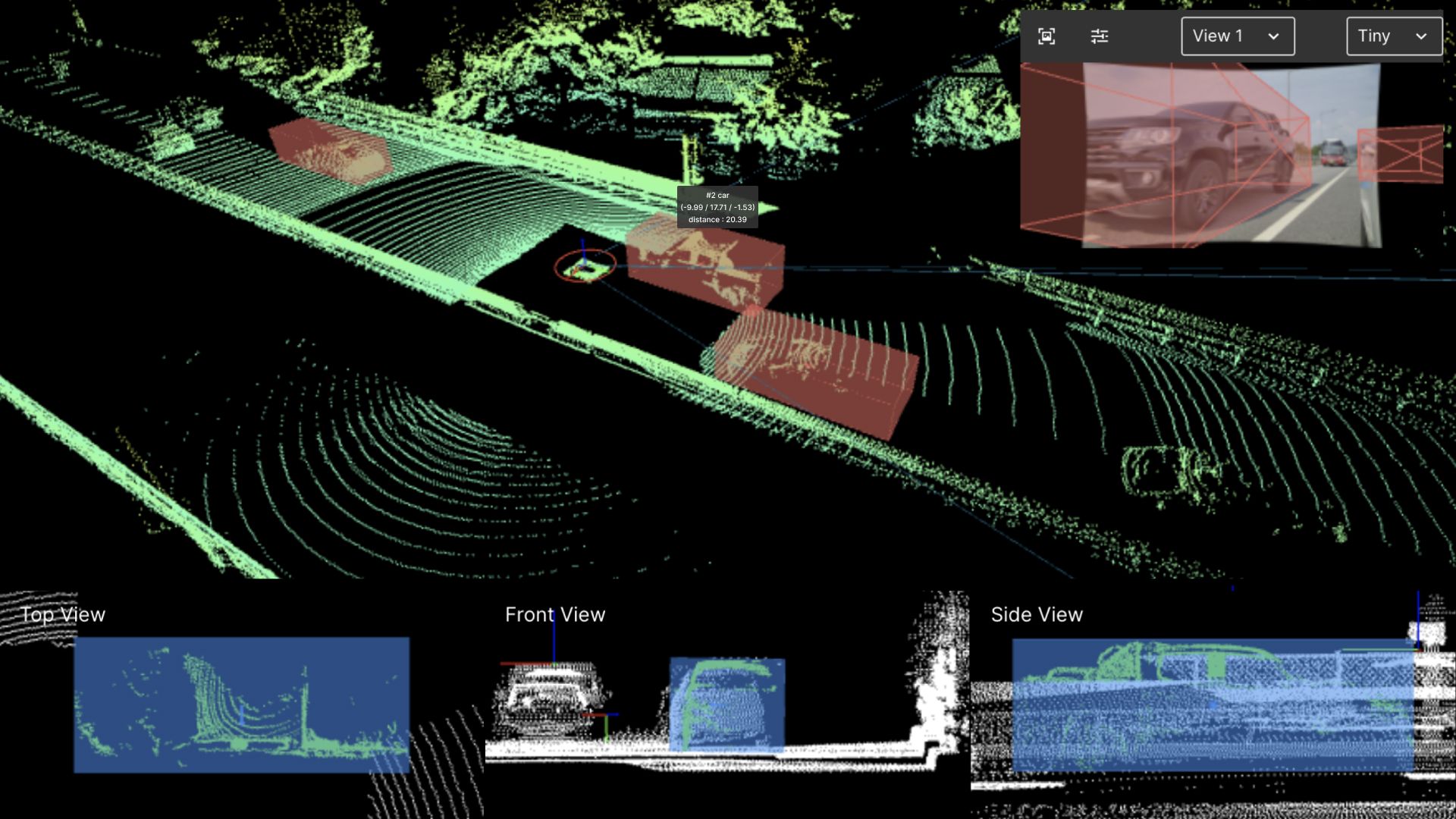
포인트 클라우드(Point Clouds)는 주로 LiDAR 센서를 사용하여 얻은 3차원 정보를 나타내는 데이터입니다. 이는 3차원 공간을 스캔하여, 3차원 상에서 좌표값을 가지는 개별 포인트들의 집합으로 구성된 결과를 표현합니다. 포인트 클라우드는 3차원 미디어를 표현하는 데 사용되며, VR (Virtual Reality, 가상현실), AR (Augmented Reality, 증강현실), MR (Mixed Reality, 혼합현실) 및 자율주행 서비스 등 다양한 산업에 적용될 수 있습니다.
포인트 클라우드는 일반적으로 연속적인 정보를 촬영하여 비디오와 유사한 방식으로 사용됩니다. 일반적으로 이미지 데이터 보다는 낮은 프레임 속도(5~10 fps)로 촬영되며, 각 프레임을 `Scan`이라고 부릅니다. 포인트 클라우드 데이터는 일반적으로 `*.pcd` 확장자를 가진 파일로 저장되고 x, y, z 좌표로 표현되는 수 많은 점들에 대한 정보와 LiDAR 센서에 대한 정보 등으로 구성됩니다. 자율주행 시나리오에서는 한 프레임에 저장된 포인트 수가 수만 개에서 수백만 개까지 이를 수 있으며, 대규모 포인트 클라우드는 도시 정보와 같은 대상을 표현하기 위해 수억 개의 포인트를 포함할 수도 있습니다. 이러한 포인트 클라우드는 여러장의 `Scan`을 하나로 통합하는 방법 등을 통해 생성됩니다.
포인트 클라우드 데이터를 획득하기 위한 고해상도 공간 정보를 캡처하는 센서 기술
LiDAR는 Light Detection and Ranging(빛 감지 및 범위 측정)의 약자입니다. LiDAR는 포인트 클라우드 데이터를 획득하기 위한 다양한 센서 기술 중 하나입니다. LiDAR는 펄스 레이저의 형태로 빛을 사용하여 센서로부터 물체의 거리를 측정하는 원격 감지 방법이며, LiDAR를 사용하여 자율주행 차량에서 접할 수 있는 것과 같은 다이나믹한 장면의 3차원 공간을 표현할수 있습니다.
빛 감지와 거리 측정을 통해 영역을 스캔하면 LiDAR 포인트 클라우드 데이터셋이 생성되고, 포인트 클라우드의 각 포인트는 XYZ 좌표와 선택적으로 RGB 색상 정보를 가질 수 있습니다.
LiDAR는 포인트 클라우드 데이터를 취득할 수 있는 센서입니다. 모든 포인트 클라우드가 LiDAR를 사용하여 생성되는 것은 아닙니다. 디지털 카메라로부터 얻은 이미지로도(사진 측량) 포인트 클라우드를 생성할 수 있으며 사진 측량 포인트 클라우드는 각 포인트에 RGB 값을 포함하므로 색상이 존재하는 포인트 클라우드가 생성됩니다.
모든 데이터 프로젝트에서 높은 수준의 정밀성이 필요한 것은 아니기 때문에, 수집 시간과 처리 시간을 고려해 필요한 스캐닝 규모, 필요한 세부 사항의 정확성, 그리고 스캔 결과의 활용 방법에 따라 어떤 방법이 가장 효과적인지를 알아보는 것이 중요합니다.
포인트 클라우드 데이터를 사용하는 이유
포인트 클라우드 데이터를 통한 모델링은 LiDAR 센서가 제공하는 정확한 거리 측정 데이터를 활용하여 물체의 위치, 크기 및 방향을 인식하며 3차원 데이터의 개체의 기하학적 구조, 모양 및 공간 관계를 정확하게 표현합니다. 모델공간 환경에 대한 정확도가 높을수록 자율주행의 안정성은 높아지고, 사용자는 실제 세계에 있는 것처럼 가상 환경과 상호 작용하고 탐색할 수 있기 때문입니다.
예를 들어, 가상 현실에서는 개체 및 표면 거리가 실제 세계와 일치하도록 만들어지는 것이 중요합니다. 사용자가 가상 환경을 탐색하고 상호 작용해 완전히 그 세계에 몰입할 수 있어야 하니까요.
포인트 클라우드 데이터 3D 모델링은 객체의 위치 및 크기 등의 공간 정확도를 유지함으로써 더 현실적인 가상 현실, 자율주행 환경을 갖춘 고품질의 모델을 구축할 수 있습니다.
슈퍼브 플랫폼을 통한 포인트 클라우드 데이터 처리시의 장점
과거에는 포인트 클라우드 데이터 분류 작업이 수작업으로 이루어져 많은 양의 데이터를 라벨링해야 했습니다. 그렇기에 시간이 많이 소요되었고 정확도 측면에서 부족한 경우가 많았죠. 시간이 지나며 기술이 발전하여 자동으로 데이터를 분류할 수 있게 되었습니다. 다음은 슈퍼브 라벨을 통한 포인트 클라우드 데이터 처리 시 몇 가지 장점입니다.
- 정밀한 개체 세분화
포인트 클라우드 데이터 라벨링 시 개체를 정밀하게 세분화할 수 있습니다. 에서는 3D 공간과 객체 경계를 더 명확하게 분리하여 객체의 위치, 경계 및 방향을 정확하게 식별합니다.
- 정확한 3차원 학습용 데이터 구축
상세한 공간 정보를 갖춘 정확한 포인트 클라우드는 라벨링의 품질을 높이는 데 중요한 역할을 합니다. 이 정보를 활용하여 라벨링 진행 시 모양, 크기 및 위치를 포함하여 객체의 실제 속성과 밀접하게 일치하는 어노테이션을 생성할 수 있습니다.
- 효율적인 3D 모델 학습 및 검증
슈퍼브 라벨을 통해 정확하게 라벨링된 포인트 클라우드 데이터로 구축된 모델은 공간과 객체의 특성을 자세하게 학습하여 모델의 성능을 향상시키는 데 기여합니다.
포인트 클라우드 데이터 프로젝트, 슈퍼브 라벨에서 시작하세요(닥스 내용 업데이트)
- 1단계 : META 정보 파일 준비
포인트 클라우드 데이터는(PCD : Point Cloud Data) 주로 자율주행 시나리오에서 다른 센서들의 정보와 함께 활용되는 경우가 많습니다. 따라서 포인트 클라우드 시퀀스는 LiDAR로 촬영한 포인트 클라우드 데이터 파일뿐만 아니라 PCD와 함께 수집한 이미지 데이터도 포함할 수 있습니다. IMU(Inertial Measurement Unit) 센서로 부터 취득된 위치 및 자세 정보 등과 함께 제공될 수 있으며, 이런 다양한 센서 정보들을 데이터 라벨링 또는 AI 모델에서 활용하기 위하여 각 센서의 Sync 및 Calibration 정보를 기술하는 meta 정보 파일이 필요합니다.
포인트 클라우드 데이터 구조 및 파일포맷 가이드
- 2단계 : 포인트 클라우드 업로드
- SDK 업로드
from spb.exceptions import ParameterException, ConflictException pointcloud_sequence_path = './data/pointcloud/50-frames.pcd' dataset='pointcloud-test' pointcloud_data = client.upload_pointcloud_data( manifest_file_path="{manifest file - json}", //파일이 존재하는 로컬 패스 dataset_name="{dataset_name}",// 기존에 만들어져 있는 Dataset name (혹은 아직 생성하지 않은 dataset 이름을 넣어 생성해도 무방합니다.) data_key="{data_key}" // 사용자 임의로 data_key를 작성하여 업로드할 수 있습니다. )
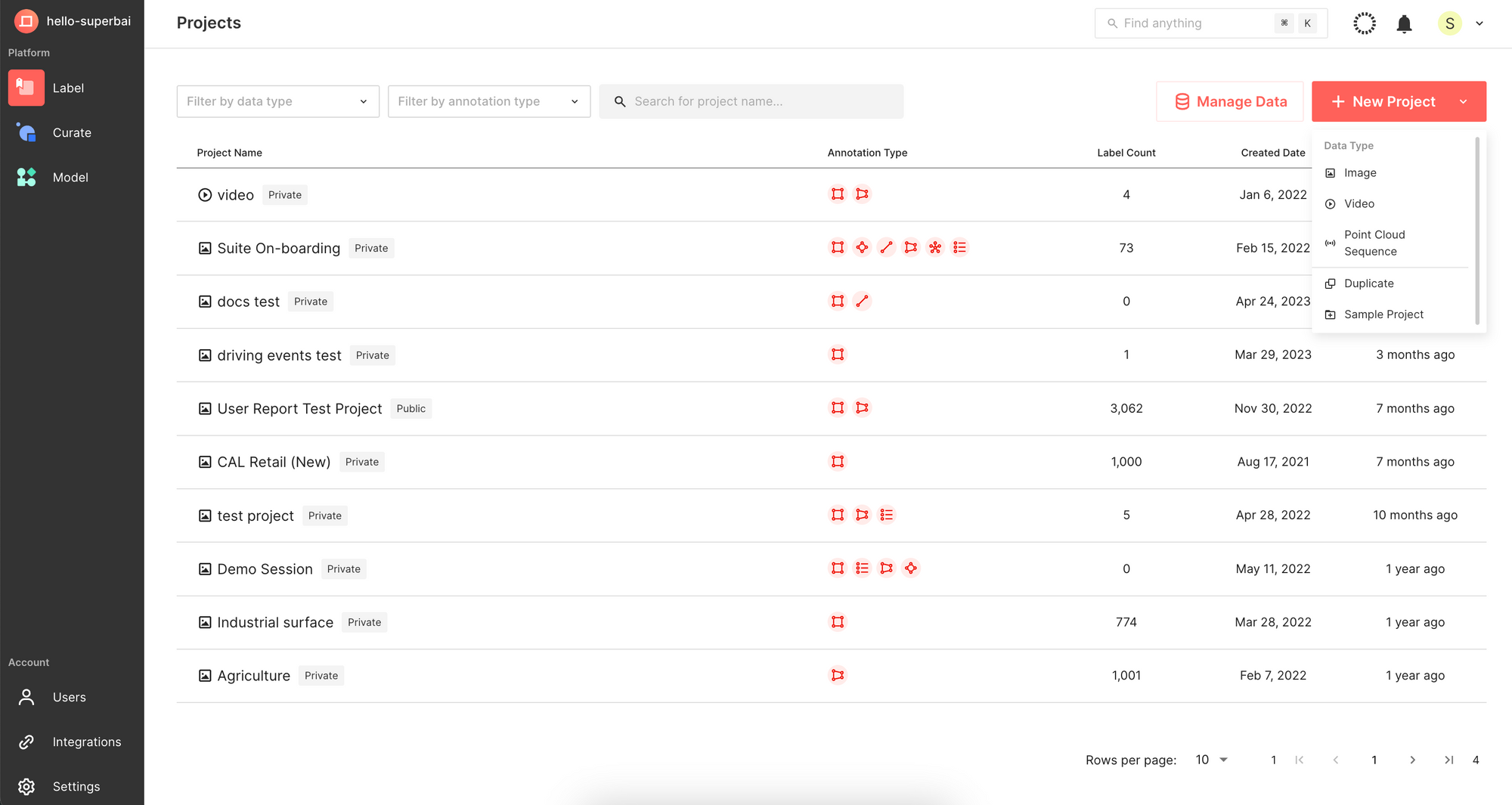
- 슈퍼브 라벨에서 포인트 클라우드 데이터 업로드

포인트 클라우드 파일은 이미지 파일과는 다르게, 업로드 전에 파일을 오픈하여 파일에 오류가 있는지에 대한 여부를 확인하기 어렵습니다. (또는 포인트 클라우드 파일이 손상되어 제공되는 경우에도 동일합니다) .pcd 파일 업로드 이후, 오류로 인해 파일이 열리지 않는 경우에는 고객 담당자 또는 support@superb-ai.com으로 문의주시면 도와드릴 수 있습니다.
- 슈퍼브 라벨에서 포인트 클라우드 프로젝트 생성 후, 데이터 업로드


- 3단계 : 포인트 클라우드 오토라벨링
포인트 클라우드의 경우에는 기본(Pre-trained) 오토 라벨은 대부분의 경우 객체를 찾지 못할 수 있습니다. 이미지, 비디오 데이터의 경우에는 어떠한 하드웨어(카메라 기종)로 촬영되더라도 수집된 데이터에 큰 차이가 없지만, LiDAR의 경우에는 센서마다 다른 특징들을 가지고 있습니다. 예를 들어, A라는 센서로 취득한 데이터로 학습한 모델(= Pre-trained model)이 B라는 센서로 취득한 데이터에 잘 동작하지 않을 가능성이 높습니다.
이런 이유에서 아예 Pre-trained Model을 가지고 오토 라벨을 실행하였을 때 좋은 결과를 보시기 힘들 수 있고, 데이터를 소량 라벨링 후 학습해서 사용하시는 것에서 더 나은 성능을 확인하실 수 있습니다. 따라서 포인트 클라우드는 라벨링 수작업을 일정 분량 진행 후, 커스텀 오토라벨(Custom Auto-Labeling, CAL)을 이용하실 것을 권장합니다.
포인트 클라우드 데이터는 이렇게 사용됩니다
- 자율주행
자율주행 차량은 안전한 주행을 위해 주변 환경을 정확하게 인식해야 합니다. 차량에 장착된 LiDAR 센서가 생성한 포인트 클라우드 데이터는 주변 환경과 거리 정보를 가진 3D 데이터를 제공합니다.
슈퍼브 라벨을 통해 포인트 클라우드 모델링을 진행할 할 시 자동차, 보행자, 자전거 타는 사람, 도로 인프라와 같은 다양한 객체에 자동으로 라벨을 달아 모델 학습 시간이 단축됩니다.
- 증강 현실 및 가상 현실
포인트 클라우드 데이터는 몰입형 증강 현실(AR) 및 가상 현실(VR) 경험을 만드는 데 유용합니다. 공간 모델링을 통해 AR/VR 시스템은 가상 객체를 실제 환경에 정확하게 덮어 씌워 사용자가 주변 환경과 원활하게 상호 작용하고 가상 경험의 현실감을 향상시킵니다.
- 건설 및 건축
건설 현장의 포인트 클라우드 데이터들을 통해 현장 모델링, 충돌 감지, 그리고 품질 관리와 같은 작업을 진행할 수 있습니다. 이를 통해 작업 효율을 높이고 오류를 줄여 프로젝트 완성도를 더욱 높일 수 있습니다.
- 로보틱스 및 드론
로보틱스 분야에서는 포인트 클라우드 데이터가 탐색, 장애물 회피, 그리고 위치 추정 및 지도 작성 SLAM(Simultaneous Localization and Mapping)에 사용됩니다. LiDAR가 장착된 드론으로 얻은 데이터들은 정밀한 농업, 야생동물 모니터링, 인프라 점검과 같은 다양한 분야에 활용될 수 있습니다.
LiDAR 어노테이션 지금 시작하기
포인트 클라우드는 건축, 엔지니어링, 건설, 가상 현실 및 자율 시스템과 같이 3차원 데이터에 의존하는 다양한 산업 및 분야에 영향을 미치고 있습니다. 슈퍼브 라벨에서는 오토라벨링을 통해 소모적이고 노동 집약적인 작업을 자동화할 수 있으므로 데이터를 더 빠르고 효율적으로 처리할 수 있습니다. 슈퍼브 라벨을 통해 더 정확한 3D 모델을 생성하며 혁신적인 AI 모델 개발을 시작해보세요. 지금 무료로 시작할 수 있습니다.