CVPR 2025 개별 객체 탐지 챌린지: 산업 현장을 위한 실용적 AI 기술의 진화
CVPR 2025 개별 객체 탐지 챌린지(Object Instance Detection Challenge)는 실제 산업 현장에서 바로 활용할 수 있는 실용적 AI 기술을 다룹니다. 기존 객체 탐지와 다른 산업 특화 AI 기술의 핵심과 실제 적용 사례를 자세히 알아보세요.

컴퓨터 비전 분야에서 가장 권위 있는 학회 중 하나인 CVPR(Conference on Computer Vision and Pattern Recognition) 2025가 올해도 전 세계 연구자들의 이목을 집중시키고 있습니다. 그 중에서도 특별히 주목할만한 챌린지가 있습니다. "열린 세계에서의 시각적 인식과 학습(Visual Perception and Learning in an Open World)" 워크숍에서 개최되는 '개별 객체 탐지 챌린지(Object Instance Detection Challenge)'입니다.
이 챌린지는 학술적 흥미를 넘어, 실제 산업 현장에서 바로 활용할 수 있는 실용적 AI 기술을 다룬다고 볼 수 있는데요. 특히 제조업, 물류, 헬스케어, 보안 등 다양한 산업 분야에서 로봇과 AI를 빠르고 효과적으로 도입하는데 필요한 핵심 기술을 평가합니다.
왜 '개별 객체 탐지'가 산업 현장을 위한 AI인가?
기존 객체 탐지의 산업적 한계
기존 객체 탐지와 개별 객체 탐지의 핵심적인 차이점은 일반화 vs 특수화에 있습니다. 기존 객체 탐지가 "모든 컵"을 찾는 일반적 능력이라면, 개별 객체 탐지는 "바로 그 컵"을 찾는 특수한 능력인 것입니다.
기존 객체 탐지는 미리 정의된 클래스에 속하는 모든 객체를 찾아내는 것이 목표였습니다. 예를 들어, "의자", "컵", "책" 같은 일반적인 카테고리로 분류된 객체들을 탐지하는 것이죠. 하지만 실제 산업 현장에서는 이런 방식으로는 한계가 명확합니다.

제조업에서 "볼트"를 탐지하는 것과 "M8 × 20mm 스테인리스 육각 볼트"를 구별해내는 것은 전혀 다른 문제입니다. 물류 센터에서 "상자"를 찾는 것과 "아마존 주문번호 #123456789의 특정 택배 상자"를 찾는 것도 마찬가지죠.
개별 객체 탐지의 산업적 의의
개별 객체 탐지(Instance Detection, InsDet)는 몇 가지 예시를 통해 정의된 특정 객체 인스턴스를 탐지하는 것을 목표로 합니다. 이는 산업 현장에서 매우 필요한 기능입니다. 예측할 수 없는 다양한 상황, 처음 보는 환경, 예상치 못한 객체 배치 등이 끊임없이 나타나기 때문입니다. 개별 객체 탐지는 이러한 열린 세계에서 로봇이 생존하고 유용한 역할을 수행하기 위한 핵심 기술입니다.
1. 제조업에서의 활용
- 품질 관리: 불량품 샘플과 똑같은 결함을 가진 제품들을 라인에서 자동으로 걸러내기
- 조립 라인: 유사해 보이는 수십 개 부품 중에서 정확한 그 부품을 정확한 위치에 조립하기
- 재고 관리: 창고의 수천 개 부품 중에서 특정 모델의 정확한 그 부품 찾기
2. 물류 및 유통업에서의 활용
- 자동 분류: 수만 개의 택배 중에서 특정 고객의 정확한 그 상품 찾기
- 재고 점검: 진열대의 수백 개 제품 중에서 특정 브랜드, 특정 모델의 정확한 재고 파악
- 피킹 로봇: 아마존 키바(Kiva) 스타일 창고에서 로봇이 정확한 상품만을 선별해서 집기
3. 헬스케어에서의 활용
- 의료 기기 관리: 병원의 수많은 의료 장비 중에서 환자별 맞춤 의료 기기 찾기
- 약품 관리: 유사한 약병들 중에서 환자별 정확한 처방약 구별하기
- 수술 도구: 수술실의 복잡한 도구들 중에서 정확한 그 수술 기구 식별하기
CVPR 2025 개별 객체 탐지 챌린지: 산업 현장을 위한 실전 평가
현실적인 산업 환경 시뮬레이션
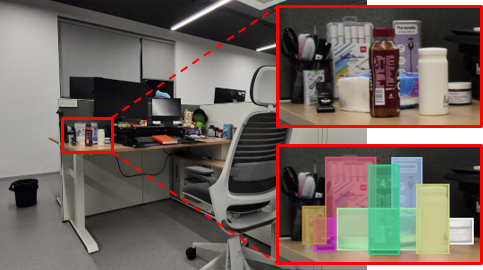
이번 CVPR 2025의 개별 객체 탐지 챌린지는 기존 개별 객체 탐지 연구들보다 훨씬 대규모에 도전적인 데이터셋을 사용합니다. 이 데이터셋의 가장 큰 강점은 실제 실내 로봇이 마주하게 될 상황을 현실적으로 시뮬레이션한다는 점입니다. 멀리서 복잡하고 어수선한 실내 환경을 관찰하며 특정 객체를 찾아내야 하는 상황을 재현합니다. 깔끔한 실험실 환경이 아닌, 실제 가정이나 사무실, 창고 같은 현실적인 공간에서의 로봇 작업을 반영합니다. 실제 산업 현장의 복잡함과 불확실성을 반영한 데이터셋이라고 볼 수 있죠.
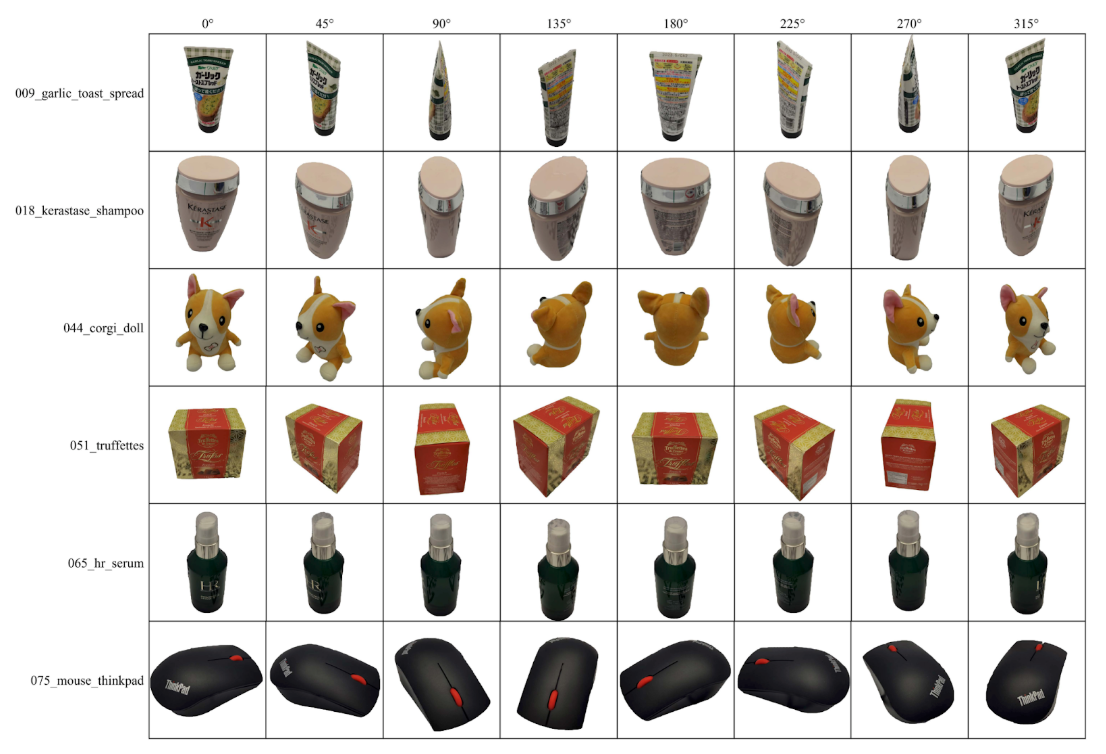
1. 고해상도 제품 카탈로그 시뮬레이션
- 100개의 서로 다른 객체 인스턴스: 각각 3072×3072 픽셀의 초고해상도
- 15도씩 회전하며 촬영한 이미지: 실제 제품 카탈로그처럼 360도 전방위 제품 이미지 제공
2. 실제 작업 환경 재현
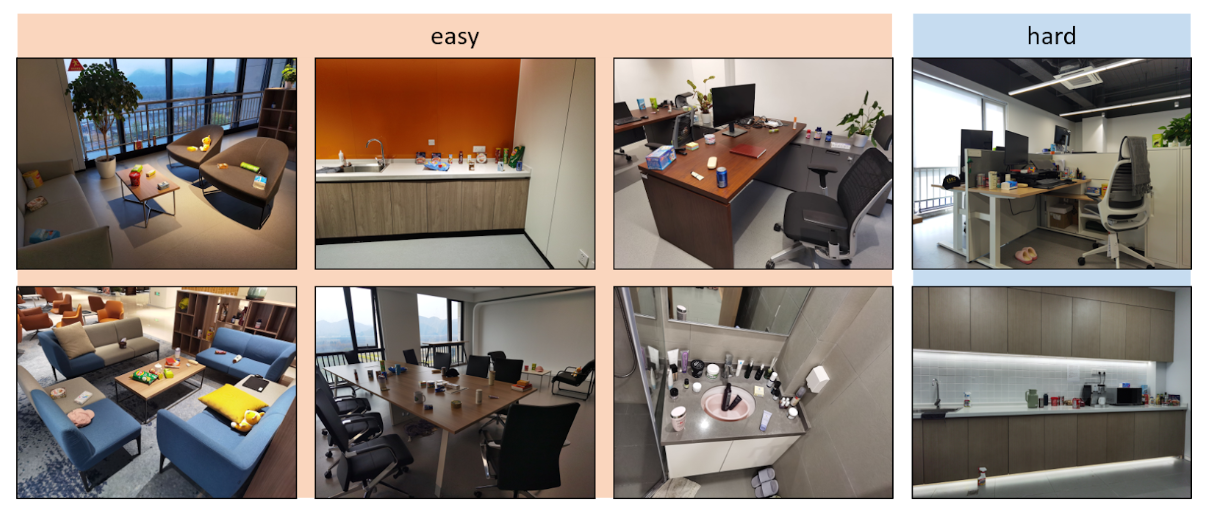
- 160개의 실제 장면 이미지: 6144×8192 해상도의 복잡한 실제 환경
- 어수선한 작업 공간: 제조 현장, 창고, 매장과 같은 현실적인 복잡함
- 난이도별 분류: 실제 산업 현장의 다양한 복잡도 수준 반영
엄격한 평가 프로토콜
챌린지에서는 바운딩 박스(Bounding Box) 예측을 통해 성능을 평가합니다. 평가 지표는 다음과 같이 세분화되어 있습니다.
- AP (Average Precision): 전체적인 탐지 정확도
- 난이도별 평가: 난이도 하/난이도 상 장면에 따른 성능 분석
- 크기별 평가: 소/중/대 객체 크기에 따른 성능 분석
- AR (Average Recall): 실제 객체를 놓치지 않고 찾아내는 능력
이러한 다각적 평가는 모델의 강점과 약점을 명확히 파악할 수 있게 해줍니다.
산업적 실용성을 위한 엄격한 조건
핵심 제약 조건: 참가자들은 테스트 환경의 실제 장면 이미지로는 모델을 학습시킬 수 없습니다. 이는 실제 로봇이 마주하게 될 상황을 그대로 반영합니다. 로봇은 사전에 본 적 없는 새로운 환경에서도 학습한 객체들을 정확히 인식할 수 있어야 하기 때문입니다.
이러한 제약은 모델의 일반화 능력을 평가하는 핵심 요소입니다. 다중 시점 프로필 이미지와 배경 데이터만으로 학습한 모델이 완전히 새로운 테스트 장면에서 얼마나 잘 작동하는지를 측정하는 것입니다.
왜 이 조건이 산업적으로 중요한가?
- 새로운 작업 환경 적응: 로봇이 새로운 공장이나 창고에 배치될 때마다 재학습할 필요가 없음
- 즉시 배포 가능: 제품 카탈로그 이미지만으로도 바로 현장에 투입 가능
- 비용 효율성: 현장별 별도 데이터 수집과 학습 과정이 불필요
개별 객체 탐지 챌린지의 기술적 핵심 포인트
퓨샷 학습(Few-Shot Learning)의 극한
적은 수의 예시 이미지(24장의 다중 시점)만으로 객체를 완벽히 학습해야 합니다. 이는 인간의 학습 방식과 유사한 효율적 학습 능력을 요구합니다.
시점 불변성(Viewpoint Invariance)
다양한 각도에서 촬영된 프로필 이미지를 바탕으로, 실제 환경에서 예측하지 못한 각도나 조명에서도 같은 객체를 인식할 수 있어야 합니다.
복잡한 환경에서의 강건성(Robustness)
어수선하고 복잡한 실제 환경에서도 정확한 탐지가 가능해야 합니다. 조명 변화, 배경 복잡성 등의 방해 요소들을 극복해야 합니다.
이처럼 개별 객체 탐지는 로봇이 단순한 작업 수행 도구를 넘어 진정한 AI 파트너로 발전하는 데 필수적인 기술입니다.
CVPR 2025 개별 객체 탐지 챌린지에서 전 세계 연구자들이 어떤 혁신적인 접근법들을 선보일지, 그리고 이것이 실제 로봇 기술의 발전에 어떤 영향을 미칠지 주목해보시기 바랍니다. 산업 특화 비전 파운데이션 모델의 우수성이 이런 권위 있는 국제 대회에서 검증된다는 것은, 차세대 산업용 AI 기술 분야에서 글로벌 리더십을 확보할 수 있는 중요한 기회임을 의미합니다. 개별 객체 탐지 챌린지 관련 슈퍼브에이아이의 소식도 곧 알려드리겠습니다.
