① 젠슨 황이 선언한 AI의 다음 물결, 피지컬 AI란 무엇인가? 개념 및 역사 정리
엔비디아 젠슨 황이 AI의 다음 물결로 선언한 '피지컬 AI', 과연 무엇일까요? 챗GPT를 넘어 현실 세계와 상호작용하는 피지컬 AI의 정확한 정의와 사이버네틱스에서부터 시작된 반세기의 역사, 미래 가능성까지 한눈에 확인해 보세요.

1. 왜 지금 '피지컬 AI'인가?
"AI 다음의 개척 분야는 피지컬 AI입니다. 이제 AI가 물리 법칙을 이해하기 시작했습니다." - 젠슨 황, NVIDIA CEO (CES 2025 기조연설)
AI 혁명을 이끌고 있는 엔비디아의 CEO 젠슨 황은 단언했습니다. 텍스트와 이미지를 생성하는 것을 넘어, 이제 AI는 현실 세계를 이해하고, 상호작용하며, 물리적인 일을 수행하는 '피지컬 AI(Physical AI)'의 시대로 접어들고 있습니다.
피지컬 AI는 단순한 기술 트렌드를 넘어 산업의 패러다임을 바꾸고 있습니다. 글로벌 시장조사기관인 '어스튜트 애널리티카(Astute Analytica)'의 산업용 로봇 시장 보고서에 따르면, 전 세계 산업용 로봇 시장은 2024년 269억 9천만달러(약 37조 7천억원)에서 2033년에는 2352억 8천만달러(약 328조 6천억원) 규모로 성장할 전망입니다.
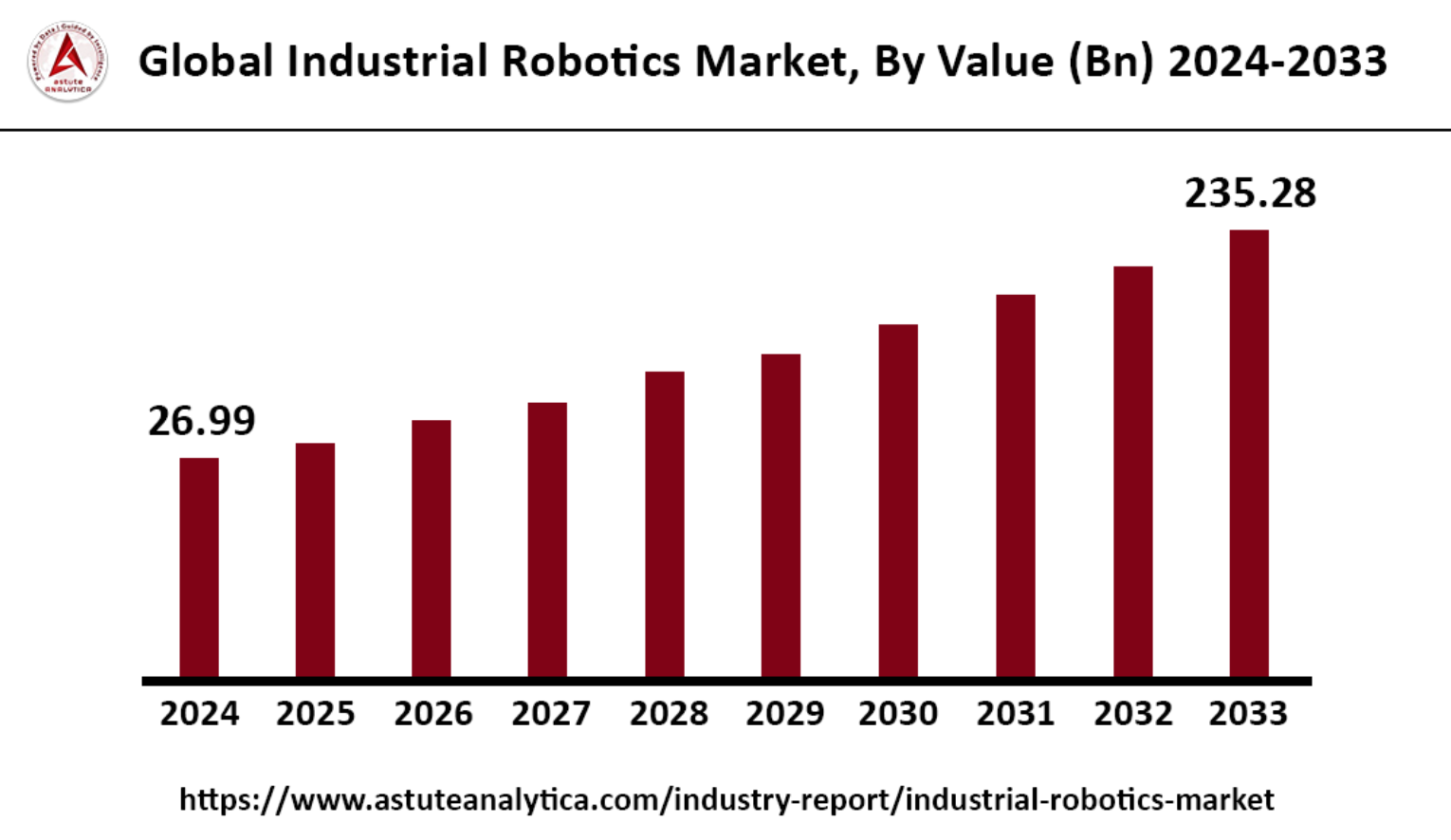
폭발적인 성장은 피지컬 AI가 제조업, 물류, 의료 등 전통 산업의 난제들을 해결하고 새로운 가치를 창출하고 있음을 증명합니다. 이번 글에서는 피지컬 AI의 핵심 개념부터 최신 기술 동향, 실제 산업 사례, 그리고 성공적인 도입을 위한 가장 중요한 요소까지 모든 것을 깊이 있게 살펴보겠습니다.
2. 피지컬 AI란 무엇인가?
정의: 현실 세계와 상호작용하는 AI
피지컬 AI(Physical AI)란, 센서(카메라, 라이다 등)를 통해 물리적 환경을 인식하고, 수집된 정보를 바탕으로 스스로 판단하며, 로봇 팔이나 바퀴와 같은 구동 장치(Actuator)를 통해 현실 세계에 물리적인 영향을 미치는 AI 시스템을 총칭합니다.
소프트웨어 AI와의 근본적 차이
챗GPT와 같은 기존의 소프트웨어 AI를 '병 속의 뇌(Brain in a Jar)'에 비유할 수 있습니다. 디지털 데이터 속에서 정보를 학습하고 텍스트나 이미지로 결과를 생성하지만, 현실 세계에 직접 개입할 수는 없습니다.
반면 피지컬 AI는 '몸을 가진 뇌(Brain in a Body)'입니다. 현실의 복잡성, 불확실성, 시시각각 변하는 환경 속에서 상호작용하며 임무를 수행해야 합니다. 문을 열기 위해 손잡이의 모양과 재질을 '보고', 얼마나 힘을 주어 돌려야 할지 '판단'하고, 로봇 팔로 직접 '행동'하는 것이 바로 피지컬 AI입니다.
관련 개념: 임바디드 AI(Embodied AI), 로보틱 AI와의 관계
- 임바디드 AI (Embodied AI): '몸을 가진 AI'라는 의미로, 피지컬 AI와 거의 동일한 의미로 사용됩니다. 특히 학계나 연구 분야에서 환경과의 상호작용을 통해 학습하는 측면을 강조할 때 주로 사용됩니다.
- 로보틱 AI (Robotic AI): AI 기술이 탑재된 로봇을 의미하며, 피지컬 AI의 가장 대표적인 구현 형태입니다. 피지컬 AI가 더 광범위한 개념이라면, 로보틱 AI는 그 개념이 로봇이라는 하드웨어에 구체화된 결과물에 가깝습니다.
3. 피지컬 AI의 역사: 사이버네틱스에서 AI 팩토리까지
'피지컬 AI'라는 용어 자체는 최근에 젠슨 황과 같은 AI 리더들이 현재의 AI 기술 수준을 로보틱스와 결합하며 대중화시켰습니다.
그러나 개념의 뿌리, 즉 '몸을 가지고 물리적 세계와 상호작용하며 학습하는 지능'에 대한 아이디어는 AI 연구의 초기부터 존재해 왔습니다. 그 역사는 크게 4단계의 진화 과정을 거칩니다.
1. 태동기 (1940년대 ~ 1960년대): 사이버네틱스와 최초의 '행동하는 기계'
피지컬 AI의 개념적 씨앗은 1940년대 수학자 노버트 위너(Norbert Wiener)가 주창한 '사이버네틱스(Cybernetics)'에서 찾을 수 있습니다. 사이버네틱스는 생명체와 기계가 어떻게 피드백 루프(Feedback Loop)를 통해 스스로를 제어하고 환경과 상호작용하는지를 탐구한 학문입니다. 이는 '환경 인식 → 행동 → 결과 피드백'이라는 피지컬 AI의 핵심 작동 원리와 정확히 일치합니다.
이 아이디어는 1960년대에 이르러 구체적인 실체를 갖게 됩니다.
- 최초의 산업용 로봇, 유니메이트(Unimate, 1961): 정해진 프로그램을 반복 수행하며 GM 공장에서 인간 노동자를 대체했습니다. 비록 지능은 없었지만, AI가 가질 '몸'의 등장을 알렸습니다.
- 최초의 피지컬 AI, 셰이키(Shakey, 1966-1972): 스탠퍼드 연구소(SRI)에서 개발한 '셰이키'는 피지컬 AI의 진정한 원형으로 평가받습니다. 셰이키는 카메라와 센서로 주변 환경을 '인지(Perception)'하고, 스스로 길을 찾고 장애물을 피해 작업을 수행하도록 '추론(Reasoning)'했으며, 바퀴를 움직여 '행동(Action)'했습니다. 이는 AI 연구 역사상 처음으로 인지-판단-행동을 통합한 사례였습니다.

2. 철학적 전환기 (1980년대 ~ 1990년대): '몸이 생각을 만든다'
1980년대, MIT의 로드니 브룩스(Rodney Brooks) 교수는 당시 주류 AI 연구에 반기를 들었습니다. 그는 복잡한 기호와 규칙으로 세상을 이해하려는 '추상적 지능' 연구(마치 '병 속의 뇌'처럼)를 비판하며 "지능은 몸을 통해 현실 세계와 직접 부딪히며 발현된다"고 주장했습니다.
그의 '누벨 AI(Nouvelle AI)' 접근법은, "코끼리는 체스를 두지 않는다 (Elephants Don't Play Chess)"라는 유명한 논문에서 잘 드러나듯, 세상에 대한 완벽한 내적 모델 없이도 단순한 행동 규칙들의 상호작용이 모여 복잡하고 지능적인 행동을 만들어낼 수 있음을 보여주었습니다. 이는 '몸의 경험'이 지능의 필수 조건임을 역설하며, 오늘날 임바디드 AI(Embodied AI)와 피지컬 AI의 강력한 철학적 기반이 되었습니다.
3. 학습 능력의 진화 (1990년대 ~ 2010년대): 강화학습과 딥러닝
피지컬 AI가 스스로 똑똑해지려면 '학습' 능력이 필수적입니다. 이 시기, 시행착오를 통해 보상을 최대화하는 행동을 배우는 '강화학습(Reinforcement Learning)'이 크게 발전했습니다.
그리고 2012년, 딥러닝이 컴퓨터 비전 분야에서 혁명을 일으키면서 피지컬 AI는 강력한 '눈'을 갖게 되었습니다. 로봇은 비로소 사물을 높은 정확도로 인식하고, 그 의미를 이해할 수 있게 되었습니다. 학습 능력(강화학습)과 인식 능력(딥러닝)의 결합은 피지컬 AI가 실험실을 나와 현실 문제 해결에 나설 수 있는 발판을 마련했습니다.
4. 현재 (2020년대 ~ ): 거대 모델과의 융합과 '피지컬 AI'의 대중화
최근 생성 AI를 구동하는 파운데이션 모델(Foundation Models)이 등장하면서 피지컬 AI는 역사적인 변곡점을 맞았습니다. 파운데이션 모델은 로봇에게 인간의 언어를 이해하고, 상식적인 추론을 하며, 복잡한 임무를 스스로 계획하는 강력한 '뇌'를 제공합니다. 이제 수십 년간 각기 발전해 온 로보틱스, AI, 컴퓨터 비전, 강화학습 기술이 마침내 하나의 거대한 흐름으로 합쳐지게 되었는데요.
젠슨 황은 지난 4월 Hill & Valley 포럼에서 지난 10 여 년 동안의 AI 발전을 세 가지 단계로 요약했습니다.
- 1단계: 인지 AI (Perception AI): 컴퓨터 비전(이미지, 소리, 진동, 온도 등)을 통해 세상의 정보를 인식하고 이해하는 단계 (예: AlexNet, 2012년경) 자율주행차가 차선을 인식하고, 공장 자동화 시스템이 제품의 불량을 판별하는 기술의 근간
- 2단계: 생성 AI (Generative AI): 정보의 의미를 이해하고 이를 다른 형태로 번역하거나 생성하는 단계 (예: 영어-프랑스어 번역, 텍스트-이미지 생성)
- 3단계: 추론 AI (Reasoning AI): 문제를 해결하고 새로운 상황을 인식하기 위해 추론 능력을 사용하는 단계. 디지털 로봇인 '에이전트 AI'를 생성하여 복잡한 작업을 수행
젠슨 황은 다음 AI의 물결은 물리 법칙, 마찰, 관성, 인과관계 등 물리적 추론을 이해하는 ‘피지컬 AI’라고 말했습니다. 물리적 추론의 응용 분야에는 공이 어디로 굴러갈지 예측하거나, 물체를 손상시키지 않고 잡는 데 필요한 힘의 크기를 파악하거나, 자동차 뒤에 보행자가 있음을 추론하는 것 등이 있습니다. 이 능력을 로봇에 적용하면, 로봇은 정해진 명령만 따르는 기계가 아니라, 예측 불가능한 현실 세계에서 스스로 판단하고 행동하는 지능적인 존재가 됩니다. 이는 전 세계적인 노동력 부족 문제를 해결할 핵심 열쇠입니다.
이처럼 피지컬 AI는 어느 날 갑자기 등장한 개념이 아니라, 반세기가 넘는 시간 동안 수많은 천재들의 철학과 기술이 겹겹이 쌓여 만들어진, AI 발전사의 필연적인 귀결이라고 할 수 있습니다.
4. 피지컬 AI 시대를 위한 첫걸음
지금까지 피지컬 AI가 무엇을 의미하는지, 그리고 반세기가 넘는 시간 동안 어떤 철학과 기술을 바탕으로 지금의 모습에 이르게 되었는지 그 거대한 여정을 함께 살펴보았습니다.
사이버네틱스의 이론적 씨앗에서부터 셰이키 로봇의 역사적인 첫걸음, '몸의 중요성'을 역설한 로드니 브룩스의 철학적 전환을 거쳐, 마침내 파운데이션 모델이라는 강력한 '뇌'를 만나 젠슨 황이 선언한 'AI의 다음 물결'에 이르기까지, 피지컬 AI는 이제 거스를 수 없는 시대적 흐름이 되었습니다.
'피지컬 AI란 무엇인가?'라는 질문에 답했다면, 이제 '그래서 이 기술이 어떻게 현실을 바꾸는가?'라는 더 중요하고 흥미로운 질문이 남습니다.
다음 2편에서는 피지컬 AI를 실제로 움직이는 핵심 기술(컴퓨터 비전, 강화학습 등)을 더 깊이 소개하고, 제조업과 물류, 의료 현장을 혁신하는 구체적인 산업 사례와 미래 전망에 대해 자세히 다룰 예정입니다.




슈퍼브에이아이는 피지컬 AI 시대를 준비하는 기업들이 쉽게 AI를 현장에 도입할 수 있도록 돕는 파트너입니다. 귀사의 위대한 도전에 슈퍼브에이아이의 전문성이 가장 강력한 무기가 될 것입니다. 피지컬 AI 도입 관련 궁금한 점이 있으면 아래에 내용을 남겨주세요. 바로 연락 드리겠습니다.