⑨ 미국 빅테크 피지컬 AI 트렌드(1): 엔비디아 vs 구글 전략 분석
챗봇을 넘어 '피지컬 AI' 시대로 진입한 미국 빅테크의 동향을 살펴봅니다. 엔비디아의 Cosmos 월드 모델과 구글 Gemini 3의 공간 지능 등, 현실 세계를 장악하기 위한 양대 기업의 핵심 전략과 기술 혁신을 심층 분석합니다.


1. AI 혁명의 새로운 국면, '구현(Embodiment)'의 시대
2025년 3분기의 기술적 핵심은 피지컬 AI입니다. 이 기간 동안 나스닥(NASDAQ)은 20,000포인트를 돌파하며 기술주 중심의 강력한 랠리를 이어갔으나, 동시에 2024년 말부터 제기된 'AI 거품론'과 밸류에이션에 대한 우려가 공존하는 복합적인 시장 상황이 연출되었습니다. 2025년 11월, NVIDIA의 시가총액이 5조 달러에 육박하고 Google(Alphabet)의 주가가 300달러를 돌파하는 등 시장의 자본은 AI 인프라와 물리적 구현 기술을 보유한 기업들에게 집중되는 경향을 보였습니다.
슈퍼브에이아이의 피지컬 AI 시리즈, 미국 빅테크의 피지컬 AI 분석에서는 NVIDIA, Google(Alphabet), Amazon, Tesla, Meta와 같은 미국 주요 빅테크 기업들이 지난 3개월간 발표한 물리적 AI 관련 핵심 기술, 전략적 파트너십, 하드웨어 출시 소식을 분석합니다. 현재 기술 생태계는 단순한 '챗봇' 경쟁을 넘어, 공장, 물류 센터, 가정으로 침투하는 자율 에이전트(Autonomous Agents)와 휴머노이드 로봇의 시대로 진입하고 있습니다.
이번 파트 1에서는 현실 세계의 물리 법칙을 디지털로 옮겨오고 있는 NVIDIA와, 로봇에게 고차원적인 추론 능력을 부여한 Google의 2025년 3~4분기 핵심 동향을 살펴봅니다. 파트 2에서는 테슬라, 아마존의 전략을 분석해 보겠습니다.
2. 현실의 운영체제(OS)를 장악하다: NVIDIA의 피지컬 AI 인프라 패권
2025년 하반기 NVIDIA는 단순한 GPU 칩 제조사를 넘어 물리적 세계의 시뮬레이션과 제어를 담당하는 플랫폼 기업으로 완전히 진화했습니다. 젠슨 황 CEO는 2025년 11월 실적 발표와 CES 2025 기조연설 등을 통해 "피지컬 AI"가 차세대 AI의 핵심 동력임을 천명하며, 이를 뒷받침할 강력한 소프트웨어 스택과 모델을 공개했습니다.
2.1 NVIDIA Cosmos: 물리적 상식을 가진 월드 파운데이션 모델
NVIDIA 전략의 정점에는 2025년 11월 공개된 NVIDIA Cosmos 월드 파운데이션 모델(World Foundation Model) 플랫폼이 있습니다. 기존의 언어 모델이 텍스트의 통계적 확률을 학습했다면, Cosmos는 물리 법칙과 인과관계, 객체 영속성(Object Permanence)을 학습하여 로봇에게 일종의 '물리적 상식'을 부여합니다.
2.1.1 기술적 아키텍처와 차별성
NVIDIA는 약 9,000조 토큰 규모의 데이터를 학습시켜 Cosmos 모델을 구축했습니다. 이는 로봇이 처음 접하는 환경에서도 "이 컵을 밀면 떨어져서 깨질 것이다"라는 미래 상태를 예측할 수 있게 만듭니다. Cosmos는 두 가지 핵심 아키텍처로 구성됩니다.
- Cosmos Autoregressive Model (자기회귀 모델):
- 기능: 현재의 관측 데이터를 바탕으로 미래의 물리적 상태를 예측합니다.
- 기술적 특징: 트랜스포머 디코더 아키텍처를 기반으로 하며, 3D RoPE(Rotary Position Embeddings) 기술을 도입하여 공간과 시간 차원을 분리하여 인코딩합니다. 이는 로봇이 움직이는 물체의 궤적을 정확히 예측하고, 자신의 행동이 환경에 미칠 영향을 시뮬레이션하는 데 필수적입니다.
- 응용: 자율주행차나 로봇이 실시간으로 경로를 계획하고 충돌을 방지하는 의사결정 과정에 사용됩니다.
- Cosmos Diffusion Model (확산 모델):
- 기능: 텍스트 프롬프트나 간단한 입력만으로 고해상도의 물리적으로 정확한 비디오를 생성합니다.
- 기술적 특징: 비디오 압축 기술과 텍스트 통합 기술을 결합하여, 로봇 학습을 위한 합성 데이터를 무한히 생성할 수 있습니다.
- 응용: 실제 세계에서 데이터를 수집하기 어려운 위험한 시나리오(예: 화재 현장, 충돌 사고)를 시뮬레이션하여 로봇을 학습시키는 데 활용됩니다.
[표 1] NVIDIA Cosmos 월드 파운데이션 모델의 핵심 사양 및 기능
NVIDIA는 이 모델들을 개방형 라이선스로 제공함으로써, 전 세계 로봇 개발자들이 NVIDIA의 CUDA 및 Isaac 플랫폼 위에서 애플리케이션을 개발하도록 유도하고 있습니다. 이는 PC 시대의 윈도우, 모바일 시대의 안드로이드와 같은 '플랫폼 락인(Lock-in)' 효과를 피지컬 AI 시장에서도 재현하려는 전략으로 해석됩니다.
2.2 옴니버스 블루프린트와 AI 슈퍼팩토리
NVIDIA는 로봇 개체를 넘어, 로봇이 활동하는 공간인 공장 전체를 지능화하는 '옴니버스 블루프린트' 를 2025년 10월 말 발표했습니다. 이는 디지털 트윈(Digital Twin) 기술을 산업 현장에 전면적으로 적용하기 위한 아키텍처입니다.
- 산업 파트너십의 확장: 지멘스, 폭스콘, 도요타 등이 이 블루프린트를 채택했습니다. 특히 지멘스는 자사의 Xcelerator 플랫폼과 옴니버스를 연동하여, 공장 설계 데이터가 실시간으로 옴니버스 시뮬레이션에 반영되도록 했습니다.
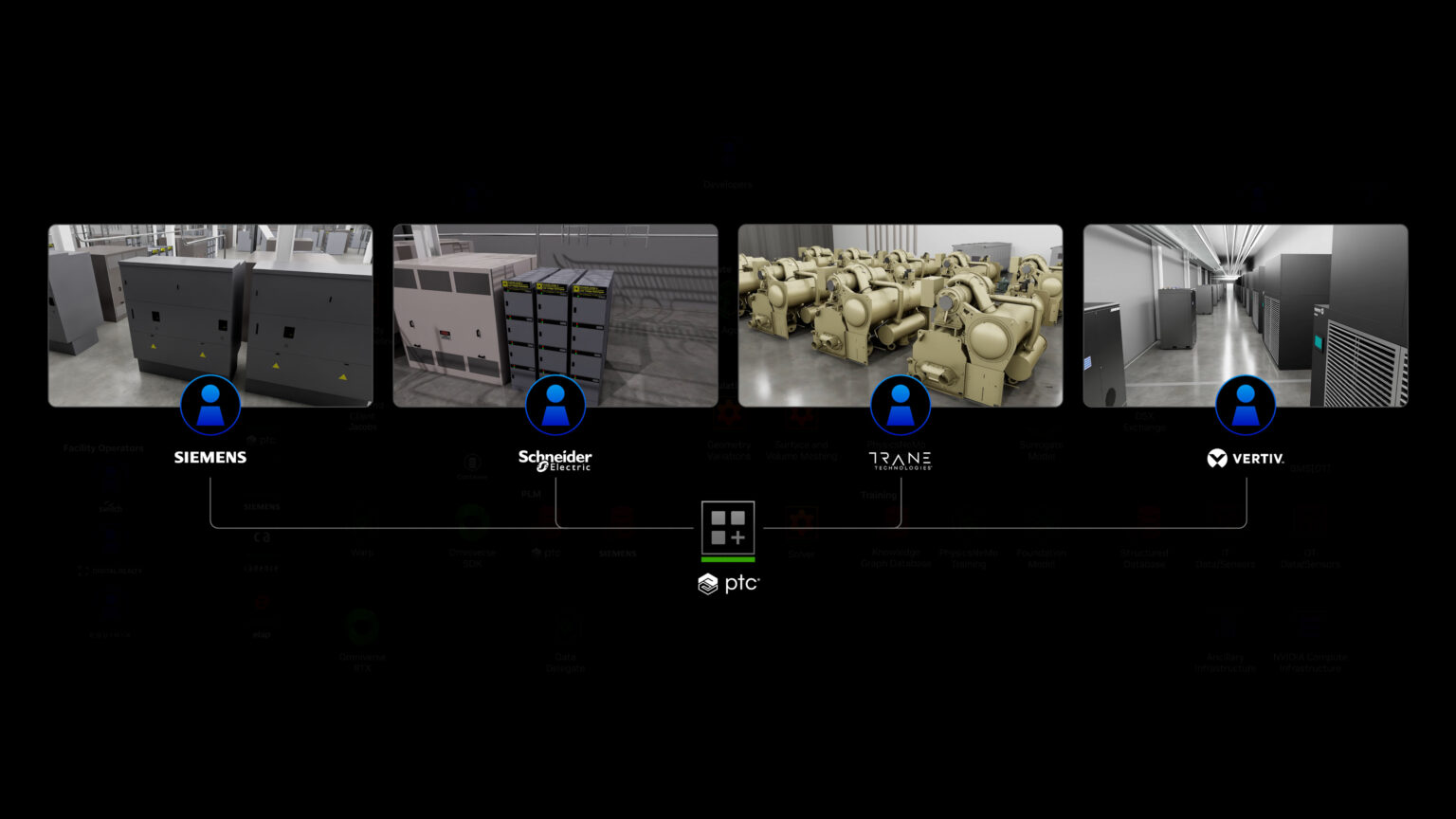
- 전력 및 냉각 시뮬레이션: 주목할 점은 이 시스템이 단순히 로봇의 동선뿐만 아니라, 공장 내 데이터센터의 전력 소비와 냉각 효율까지 시뮬레이션한다는 것입니다. AI 로봇이 소비하는 막대한 전력을 관리하기 위해 Cadence의 Reality Digital Twin 플랫폼과 연동하여 열 관리 및 공기 흐름까지 최적화합니다.
- 마이크로소프트와의 결합: 2025년 11월 Microsoft Ignite 행사에서 발표된 바와 같이, NVIDIA는 마이크로소프트 애저와 협력하여 'AI 슈퍼팩토리'를 구축하고 있습니다. 이는 애저 클라우드 인프라 상에서 옴니버스를 구동하고, OpenUSD(Universal Scene Description) 표준을 통해 서로 다른 3D 툴 간의 데이터 장벽을 허무는 것을 목표로 합니다.
2.3 엣지(Edge) 컴퓨팅과 ROS 2 생태계 장악
중앙의 거대 모델(Cosmos)이 뇌라면, 말단에서 움직이는 로봇의 신경계는 Jetson Thor가 담당합니다.

- Project GR00T와 Jetson Thor: NVIDIA는 휴머노이드 로봇 전용 칩인 Jetson Thor를 위한 소프트웨어 스택인 Isaac ROS 4.0을 2025년 10월 싱가포르에서 열린 ROSCon 2025에서 시연했습니다. 이는 로봇이 클라우드 연결 없이도 엣지단에서 복잡한 시각적 추론과 제어를 수행할 수 있게 합니다.
- Physical AI SIG 설립: NVIDIA는 오픈 소스 로보틱스 얼라이언스(OSRA) 내에 'Physical AI 특별 관심 그룹(SIG)' 을 창설했습니다. 전 세계 로봇 운영체제(ROS)의 표준을 정의하는 그룹으로, NVIDIA는 이를 통해 GPU 가속 기능이 ROS 2의 핵심 표준으로 자리 잡도록 주도하고 있습니다. 또한 로봇의 성능 병목 현상을 실시간으로 시각화하는 Greenwave Monitor 툴을 오픈 소스로 공개하여 개발자 생태계를 지원하고 있습니다.
3. 인지 엔진의 진화: Google의 멀티모달 추론과 에이전트 제어
NVIDIA가 물리적 세계의 시뮬레이션에 집중했다면, 구글과 산하 연구 조직 딥마인드는 로봇이 복잡한 명령을 이해하고 수행할 수 있는 '지능'과 '소프트웨어 제어' 능력에 집중했습니다.
3.1 Gemini 3: 로봇을 위한 공간 지능
2025년 11월 18일, Google은 차세대 모델인 Gemini 3를 공개했습니다. Gemini 3는 단순한 언어 모델이 아니라, 로봇 제어를 염두에 둔 강력한 공간 추론 능력을 갖추고 있습니다.
- 공간적 추론과 뉘앙스: Gemini 3는 "저 지저분한 것 좀 치워"와 같은 모호한 명령을 이해하고, 방의 3차원 구조를 파악하여 '지저분한 것'이 무엇인지, 어디로 치워야 하는지를 추론할 수 있습니다.
- Gemini Robotics: Google은 범용 모델을 로봇에 특화시킨 'Gemini Robotics' 모델을 별도로 소개했습니다. 이 모델은 단 100회의 시연만으로도 새로운 작업을 학습할 수 있는 '퓨샷 러닝(Few-shot Learning)' 능력을 보여주며, 데이터 기근에 시달리는 로봇 학습의 난제를 해결할 실마리를 제공했습니다.
3.2 Project Antigravity: 에이전트 개발의 새로운 패러다임
Google은 Gemini 3와 함께 Project Antigravity라는 새로운 개발 플랫폼을 발표했습니다. 피지컬 AI 개발 환경을 근본적으로 혁신하는 도구입니다.
- AI 에이전트가 코드 편집기, 터미널, 브라우저를 모두 통제할 수 있는 권한을 가집니다.
- 개발자가 "빨간 공을 집어 들고 장애물을 피하는 ROS 2 노드를 작성해줘"라고 자연어로 명령하면, Antigravity 내의 에이전트가 코드를 작성하고, 시뮬레이터에서 테스트한 뒤, 오류가 발생하면 스스로 코드를 수정합니다. 로봇 소프트웨어 개발의 진입 장벽을 획기적으로 낮추는 시도입니다.
3.3 DeepMind의 시각적 정렬(Alignment) 연구
DeepMind는 2025년 11월 11일 Nature지에 게재된 "Teaching AI to see the world more like we do (AI가 인간처럼 세상을 보게 가르치기)"라는 논문을 통해, 로봇의 시각 시스템을 인간의 인지 구조와 일치시키는 연구 결과를 발표했습니다.
- AligNet 데이터셋: DeepMind는 수백만 장의 이미지에 대한 인간의 판단 데이터를 모은 'AligNet' 데이터셋을 구축했습니다. 이를 통해 학습된 모델은 조명이 바뀌거나 물체가 회전해도 이를 동일한 물체로 인식하는 강건성(Robustness)이 크게 향상되었습니다.
- SIMA 2와 가상 세계의 전이: 또한 DeepMind는 No Man's Sky나 Goat Simulator 3와 같은 비디오 게임 환경에서 학습한 SIMA 2 에이전트를 공개했습니다. 이 에이전트는 게임 속에서 도구를 사용하고 길을 찾는 능력을 스스로 학습하며, 이러한 능력이 실제 로봇의 네비게이션 능력으로 전이될 수 있음을 입증했습니다.
NVIDIA와 Google의 전략은 "현실 세계의 데이터는 비싸다"는 전제에서 출발합니다. NVIDIA는 Cosmos를 통해 가상 세계에서 무한한 데이터를 생성하고, Google은 Gemini 3와 Antigravity를 통해 적은 데이터로도 로봇을 똑똑하게 제어하는 방법을 찾았습니다. 이들의 기술은 향후 로봇이 '실험실'을 벗어나 '일상'으로 들어오는 속도를 결정짓는 핵심 인프라가 될 것입니다.
파트 2에서는 테슬라, 아마존, MS, 피규어 AI 등 하드웨어 및 실제 산업 적용 사례가 이어집니다.
피지컬 AI 관련 산업 현장 솔루션을 도입하시고 싶다면 슈퍼브에이아이가 정답입니다. 아래 내용을 남겨주시면 슈퍼브 전문가들이 바로 답변 드리겠습니다.